The Wobbly Table Problem, part 2
In part 1 I described the Wobbly Table problem, and explained how a positive solution follows from Dyson’s theorem:
Let be a continuous function from the 2-sphere to the real numbers. Then there are two orthogonal diameters of the sphere whose endpoints and all take the same value of .
In this post I’ll give a proof of Dyson’s theorem. Whereas Dyson’s original proof uses a geometric technique called –sets, my proof uses techniques that might be found in a first course in algebraic topology and follows the style of standard proofs of the Borsuk–Ulam theorem.
Let be a continuous function from the 2-sphere to the real numbers. We’re interested in the value of on 4-tuples of points which are the endpoints of two orthogonal diameters, so we’ll define a function , associated with , which records the value of on four points of a square at once.
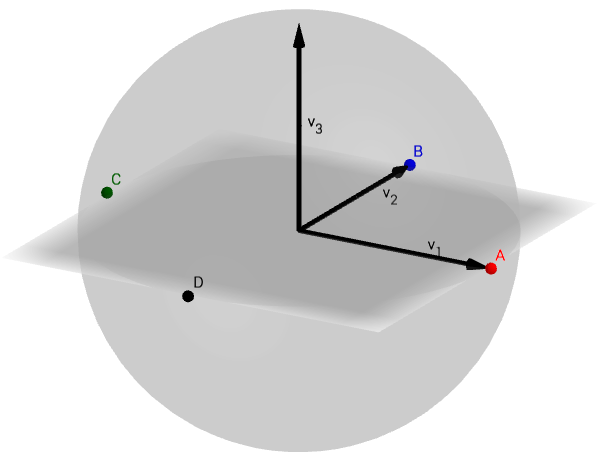
Let take the set of orthogonal matrices to Euclidean 4-space, defined as follows:
Here is a matrix expressed in terms of its column vectors. The vectors form the vertices of a square, and records the values of on this square (see the picture).
Now we make two observations. First, the function has symmetry: it’s keeping track of labels on the vertices of the squares, but if we rotate the square, the value of on that different square is related to the value of on the original square. We express this symmetry as equivariance with respect to a group action, which we now explain.
The group of symmetries of a square is the dihedral group (of order 8). This group has a representation as standard rotation matrices (as the symmetries of a square with vertices at the first two standard basis vectors and their negatives).
The group also acts on by permuting coordinate factors. Think of the four coordinate factors of as being labeled by the vertices of a square; then, applying a symmetry of a square permutes the labels.
Therefore we can express the equivariance of by:
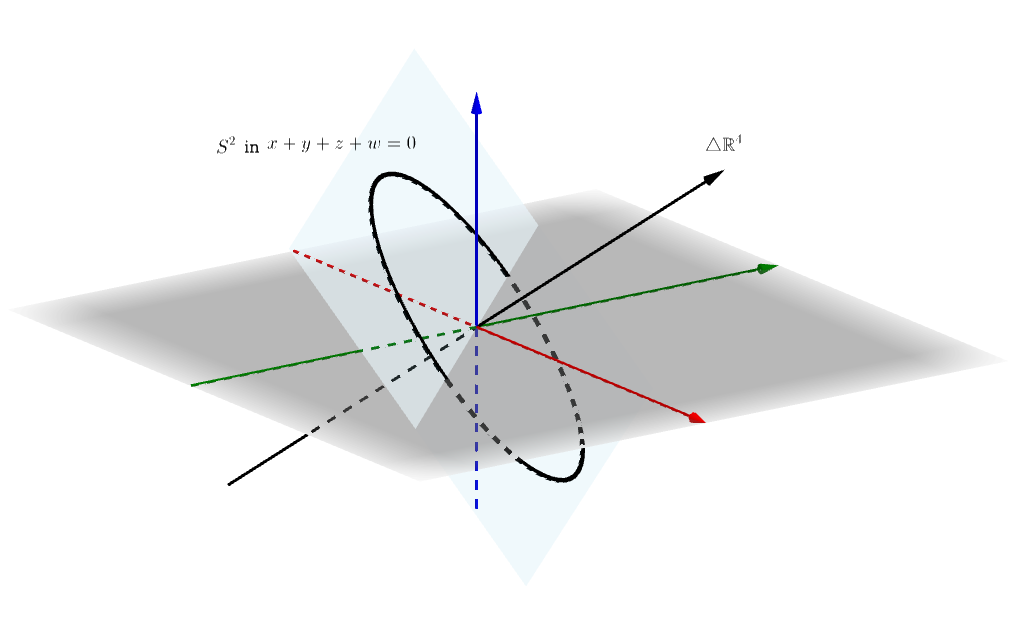
Second, phrased in terms of , Dyson’s theorem is equivalent to saying that the image of intersects the diagonal of , . If Dyson’s theorem failed to hold for a given function , then the function could be deformed so that its image lies in the unit 2-sphere in the 3-space orthogonal to . In the picture below, we show the diagonal in as well as the 2-sphere which lies orthogonal to it. Note that we show a 3-dimensional analogue: we have the diagonal pictured in , with a 1-sphere (a circle) in the complementary 2-plane to the diagonal. In 4 dimensions, there is actually a 2-sphere lying in the complementary 3-space to the diagonal.
Furthermore, this deformation remains equivariant: now permutes the vertices of a regular tetrahedron in rather than permuting the coordinates in .
After these two observations, Dyson’s theorem will follow from:
There is no –equivariant continuous function from to , where the group acts on by right multiplication and on by permuting the vertices of a regular tetrahedron.
I give the proof of this lemma in part 3.